Background
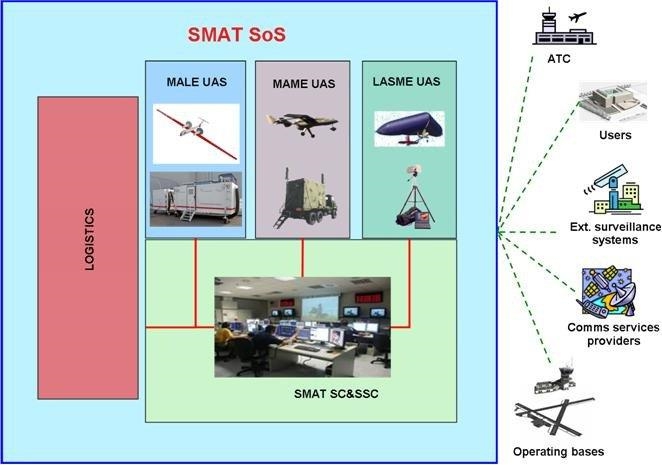
The environment monitoring has several purposes, including the prevention of geo-hydrogeological risks, forest fires, or prevention and suppression of illegal activities. The SMAT-F2 main objective is to define, design and develop an advanced monitoring system of the territory based on innovative unmanned air systems, coordinated by a supervision and coordination station (SSC). The first phase of the project, called SMAT-F1, finished at 31/12/2011, has successfully reached its objectives. The target of SMAT-F1 has been demonstrated, by a demo flight (30/09/2011), the use of three integrated UAVs controlled by a single SSC (Supervision and Coordination Station). SMAT-F2 is further developing systems to come up with solutions really operational.
Purpose
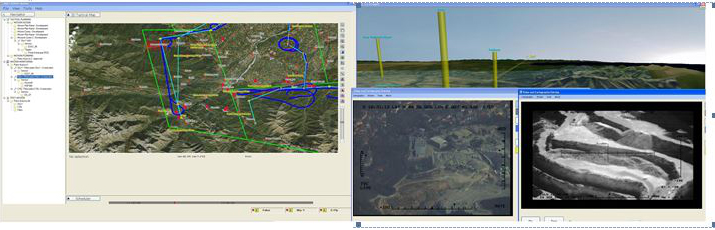
SMAT-F2 is focused on implementing a set of UAVs platforms; the fleet consists of: i) mini / micro UAVs, ii) Light UAV, iii) Male and iv) Mame UAVs. In particular, the activities are the development of sensors (EO / IR, SAR, Hyperspectral) and tools hosted on board platform. These tools are needed to acquire and process data during the different operational contexts hypothesized.
CNR IRPI, as partners and potential “end user”, collaborates with the consortium SMAT providing their skills and experiences acquired and developed over the years in the field of monitoring and evaluation of geo-hydrological instability.
Methods
The activity is divided according to following Works Package (WP):
- SMAT Requirements & Business Elements (WP1)
- UAS Autonomy (WP2)
- Sensors and Payloads Management (WP3)
- SSC (Supervision and Coordination Station) evolution (WP4)
- Airspace Integration (WP5)
The CNR IRPI activity is focused on the definition and simulation of geo- hydrogeological hazards scenarios (WP1, WP4). In the WP3, the aim of CNR IRPI is the study of the LiDAR sensor potential and its possible integration in the UAVs platforms provided in the SMAT project. This analysis is aimed to increase the spectrum of SMAT sensors and to gain added value from the possible integration and data fusion from several sensors.